TRANSFORMACIONES GEOMETRICAS
Las transformaciones geométricas
son la o las operaciones geométricas que permiten crear una nueva figura a
partir de una previamente dada. la nueva figura se llamará "homólogo" de la
original.
las transformaciones se clasifican
en:
- Directa: el homólogo conserva el sentido del original en el plano cartesiano.
- Inversa: el sentido del homólogo y del original son contrarios.
2.1 Transformaciones bidimencionales
2.1.1 Traslación.
Se aplica una traslación en un objeto para cambiar su
posición a lo largo de la trayectoria de una línea recta de una dirección de
coordenadas a otra. Convertimos un punto bidimensional al agregar las
distancias de traslación, tx y ty la posición de coordenadas original (x,y).

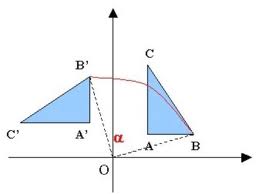
2.1.2 Rotación.
Se aplica una rotación bidimensional en un objeto al cambiar
su posición a lo largo de la trayectoria de una circunferencia en el plano de xy
. Para generar una rotación, especificamos un ángulo de rotación θ y la
posición (x r , y r ) del punto de rotación (o punto pivote) en torno al cual
se gira el objeto.

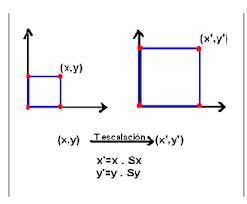
2.1.3 Escalación.
Una transformación de escalación altera el tamaño de un objeto. Se puede realizar esta operación para polígonos al multiplicar los valores de coordenadas (x, y) de cada vértice por los factores de escalación s x y s y para producir las coordenadas transformadas (x’, y’ ).

2.2 Coordenadas homogéneas y representación matricial.
En las aplicaciones de diseño y de creación de imágenes, realizamos traslaciones, rotaciones y escalaciones para ajustar los componentes de la imagen en sus posiciones apropiadas. En este tema consideramos cómo se pueden volver a formular las representaciones de la matriz de modo que se pueden procesar de manera eficiente esas secuencias de transformación. Es posible expresar cada una de las transformaciones básicas en la forma de matriz general con las posiciones de coordenadas P y P’ representadas como columnas de vector.2.15.P'=M1·P+M.
La matriz M1 es
una matriz de 2 por 2 que contiene factores de multiplicación y M2 es una
matriz de columnas de dos elementos que contiene términos de traslación. Para
la traslación, M1 es la matriz de identidad. Para la rotación o la escalación
M2 contiene los términos de traslación asociados con el punto pivote o el
punto fijo de escalación.

2.3 Composición de transformaciones bidimensionales.
Con las representaciones de matriz del tema anterior,
podemos establecer una matriz para cualquier secuencia de transformaciones como
una matriz de transformación compuesta al calcular el producto de la matriz de
las transformaciones individuales. La creación de productos de matrices de
transformación a menudo se conoce como concatenación o composición de matrices.

Traslaciones, rotaciones y escalaciones Traslaciones Se se
aplican dos vectores de traslación sucesivos (tx1, t y1) y (tx2 , t y2 ) en la posición de coordenadas P, la
localización transformada final P, la localización transformada final P’ se
calcula como:2.23.P'=T(t x2,t2)·T(tx1,ty1)·P}{=T(tx2, 2)·T(t x1,t y1)}{·P.
2.3.1 Traslaciones, rotaciones y escalaciones.
Con
las representaciones de matri, podemos establecer una matriz para cualquier secuencia
de transformaciones como una matriz de imformacion compuesta al calcular el
producto de la matriz de las transformaciones individuales. la creacion de
productos de matrices de informacion a menudo se conoce como concatenacion o
composicion de matrices.

2.3.2 Rotación de punto de pivote general.
Con un paquete gráfico que sólo ofrezca una función de
rotación para girar objetos con respecto del origen de las coordenadas, podemos
generar casi cualquier punto pivote seleccionado (xr , yr) al realizar la siguiente secuencia de operaciones de
traslación-rotación-traslación.
- Traslade el objetivo de modo que se mueva la disposición del punto pivote al origen de las coordenadas.
- Gire el objeto con respecto del origen de las coordenadas.
- Traslade el objeto de manera que se regrese el punto pivote a su posición a su posición original.
2.3.3 Escalación del punto fijo general.
La siguiente figura ilustra una secuencia de
transformación para producir escalación con respecto de una posición fija
seleccionada (xf, yf) al utilizar
una función de escalación que sólo puede escalar en relación con el origen de
las coordenadas.

- 1Traslade el objeto de modo que el punto fijo coincida con el origen de las coordenadas.
- 2 Escale el objeto con respecto del origen de las coordenadas.
- 3 Utilice la traslación inversa del paso 1 para regresar el obejto a su posición original.
2.3.4 Propiedades de concatenación.
La multiplicación de matrices es asociativa. Para tres matrices cualesquiera A, B y C, elproducto matricial A·B·C se puede lelvar a cabo al multiplicar primero a por B o multiplicarprimero B por C:
A· B·C=( A· B)·C=A·( B·C)
Por tanto, podemos evaluar los productos matriciales al utilizar una
agrupación asociativa ya sea de izquierda a derecha o de derecha a izquierda. Por
otro lado, los productos de la transformación tal vez no sean conmutativos. En general
el producto matricial A·B no es igual que B·A. Esto significa queremos
trasladar y girar un objeto, debemos tener cuidado sobre el sentido en que se
evalúa la matriz compuesta.

2.4 Transformación ventana-área de vista.
Algunos paquetes gráficos permiten que el programador especifique
coordenadas de primitivas de salida en un sistema de coordenadas de mundo de
punto flotante, usando las unidades
que sean relevantes para el programa de aplicación: angstroms, micras, metros, millas, años luz,
etcétera.

Un
área rectangular que se especifica en coordenadas mundiales se denomina
ventana. El área rectangular en el dispositivo de despliegue en el cual
se coloca la ventana se llama puerta de visión. Esta
planimetría se llama transformación de la visión o bien transformación de normalización.

Esta correspondencia se puede
efectuar si el programador de la aplicación proporciona al paquete gráfico una matriz de transformación para la correspondencia.
Otra forma es que el programador de la aplicación especifique una
región rectangular en coordenadas de mundo, llamada ventana de coordenadas
mundiales y una región rectangular correspondiente en
coordenadas de pantalla, llamada área de vista, con la cual se establece la
correspondencia de la ventana de coordenadas mundiales. La transformación que establece
la correspondencia entre la ventana y el área de vista se aplica a todas las
primitivas de salida en coordenadas de mundo para que correspondan a
coordenadas de pantalla.
COLOCACIÓN DE VENTANAS Y RECORTE
Los
programas de aplicaciones definen imágenes en un sistema de coordenadas
mundiales. Este puede ser cualquier sistema de coordenadas Cartesianas
que un usuario halle conveniente. Comúnmente, un paquete de graficas permite a un usuario
especificar qué área de la definición de la imagen se desplegara y donde
se colocara en el dispositivo de despliegue. Podría elegirse una sola
área para el dispositivo de despliegue o bien podrían seleccionarse
varias áreas. Estas áreas pueden colocarse en localidades aparte del
despliegue o bien un área puede servir como una pequeña inserción en un
área mayor. Este proceso de transformación implica operaciones para
trasladar y escalar áreas seleccionadas y para borrar partes de la
imagen que estén fuera de las áreas. Estas operaciones se conocen como colocación de ventanas y recorte.
CONCEPTOS DE COLOCACIÓN DE VENTANAS
2.5 Transformaciones de la composición general y de eficiencia computacional
Una transformación bidimensional
general, que representa una combinación de traslaciones, rotaciones y escalaciones.
Solo necesitamos efectuar cuatro multiplicaciones y cuatro adiciones para
transformar las posiciones de las coordenadas. Este es el número máximo de
cálculos que se requieren para cualquier secuencia de transformación, una vez
que se han concatenado las matrices individuales y evaluadas los
elementos de la matriz compuesta. Sin concatenación, se aplicarían las
transformaciones individuales una a la vez y se podría reducir en forma
considerable el número de cálculos.
2.6 Representación matricial de transformaciones tridimensionales.
Sí como las transformaciones
bidimensionales se pueden representar con matrices de3 X 3 usando
coordenadas homogéneas, las transformaciones tridimensionales se pueden
representar con matrices de 4 X 4, siempre y cuando usemos
representaciones de coordenadas homogéneas de los puntos en el espacio
tridimensional. Así, en lugar de representar un punto como (x, y, z ),
lo hacemos como (x, y, z, W ), donde dos de estos cuádruplos representan
el mismo punto si uno es un multiplicador distinto de cero del otro: no
se permite el cuádruplo (0, 0, 0, 0). Como sucede en el espacio
bidimensional.
2.7 Composición de transformaciones tridimensionales.
La transformación de un punto a esta forma se denomina homogeneización,
igual que antes. Además los puntos cuya coordenada W es cero se llaman puntos
en el infinito. También existe una interpretación geométrica. Cada punto en el
espacio tridimensional se representa con
una línea que pasa por el origen en el espacio de cuatro dimensiones, y las representaciones
homogeneizadas de estos puntos forman un subespacio tridimensional de un espacio de cuatro dimensiones definido por la
ecuación
W = 1.
No hay comentarios:
Publicar un comentario